

Как сделать BEAM-робота?
Еще недавно все эти Электроники, Терминаторы и прочие Железные Дровосеки рождались исключительно в бурном воображении фантастов. Однако уже сейчас сосуществование робота и человека стало уже почти обыденным, и все чаще звучат слова о том, что третье тысячелетие будет принадлежать именно этим искусственным созданиям. (Андрей Ильин)
Введение
Робототехника с каждым месяцем развивается, появляются новые виды роботов, новые возможности; количество инвестиций в сферу робототехники с каждым годом увеличивается, привлекается все больше молодых ученых, самоучки-робототехники потрясают своими безумными изобретениями…
Этот список можно продолжать еще долго. Но основная мысль все выше сказанного – РОБОТОТЕХНИКА ШАГАЕТ СЕМИМИЛЬНЫМИ ШАГАМИ.
Именно в данный момент, в настоящее время, в то время, в которое живем мы с вами, развиваются роботы! Развивается целая индустрия, которая в будущем будет многим приносить миллионы. Как говорится, океану пофиг черпаешь ты из него ложками или цистернами.
Именно сейчас нужно ловить волну!
К этому я вас призываю и помогаю. Помогаю тем, что делюсь своим опытом, своими знаниями…
Создание робота
Все…хватит всяких речей, нужно действовать!
Как вы уже поняли, будем мы делать робота, который будет ехать к источнику света и останавливаться, если такового нет. Стоит сказать, что это самый простой робот, которого может сделать каждый без какого-либо образования. Схема создания данного робота описана на многих сайтах, но ни на одном из них не написано как действительно нужно соединять все провода, микросхемы, двигатели и другое. Одно дело, когда человек видит голую схему, которую не каждый и поймет, а другое дело, когда все дотошно и понятно показано на фотографиях.
В этой статье я ничего нового не открываю, не делаю какого-то нового робота.
Я просто взял схему робота, описанную на многих сайтах рунета, сделал по ней робота. Но все свои действия я сфотографировал.
Данная статья представляет собой небольшой пошаговый обучающий курс по созданию реального робота.
Шаг 1
Итак…наша задача сделать BEAM-робота. Что для этого нужно?
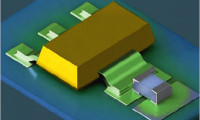
- L293D (драйвер двигателей) – 280 рублей (1 штука)
- Резистор не мене 100 Ом (я использовал 180 Ом) – 36 рублей (2 штуки)
- Фототранзистор – 23 рубля (2 штуки)
Это основные детали, которые нам понадобятся. Но нужен еще корпус робота, источник питания, двигатель и колеса.
Я не захотел изобретать велосипед и поэтому взял корпус от своей старой игрушки, два электромотора 203:1 и гусеничное шасси. И у меня получилась вот такая конструкция.

Но не думаю, что у вас есть такая же игрушка. Поэтому альтернативным вариантом будет создания корпуса из… дерева. Да-да – из дерева. Не пугайтесь. Конечно, вы можете сделать и из пластмассы, но не у каждого она есть. А вот дерево везде можно найти.
Корпус нашего робота будет состоять из прямоугольника со сторонами 100 мм на 60 мм (ширина может быть больше, если вы будете использовать электродвигатели больших размеров).
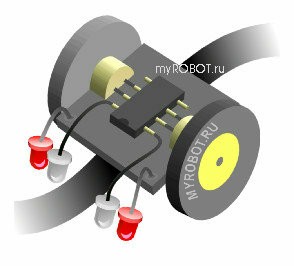
Вот такая конструкция должна получиться, если вы будете делать корпус из древесины. Цифрами обозначены:
- Электромотор с колесом
- Электромотор с колесом
- Шарик со сквозным отверстием, через которое пропущена проволока и прикреплена к корпусу
Думаю, что с корпусом вы дальше сами разберетесь, потому что это не самая главная проблема, которую нам нужно решить, да и если вы захотели сделать робота, то смекалка у вас точно должна быть.
Шаг 2
Ну что же… вы сделали корпус и теперь можно приступать к паяльным работам.
Я не буду рассказывать про всякие параметры L293D: об этом вы можете прочитать на других сайтах. Я покажу вам фотографии, на которых вы наглядно увидите, что и куда нужно подсоединять.
Поехали!
Для начала берем L293D и разгибаем входы-выходы.
Шаг 3
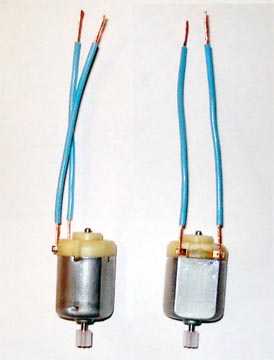
К двум электромоторам припаиваем четыре провода.
Шаг 4
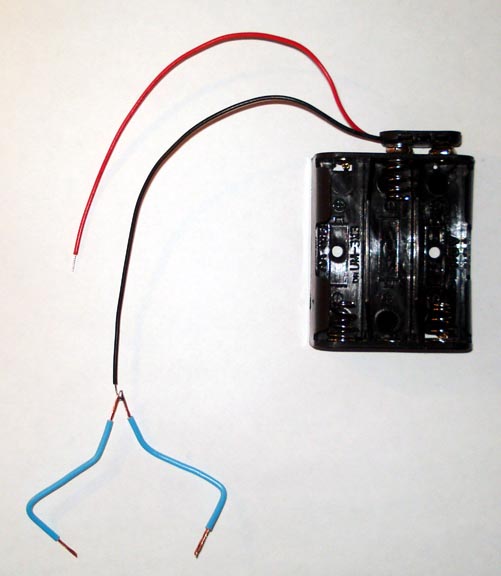
Берем держатель батареек и припаиваем к минусу два провода.
Шаг 5
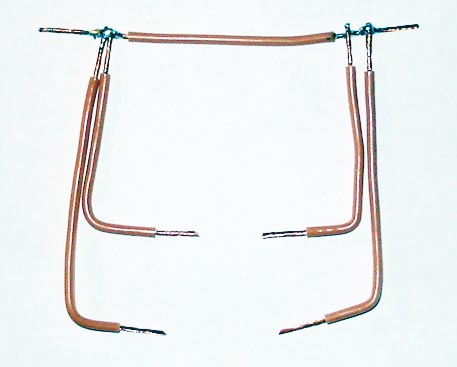
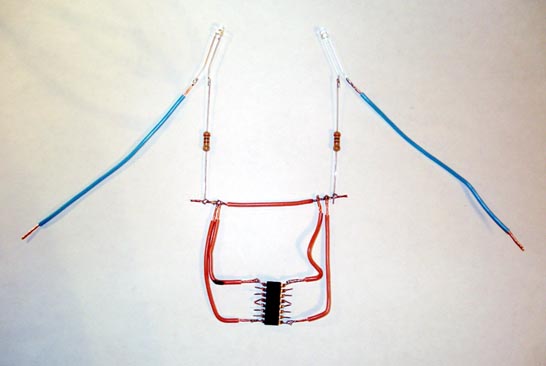
Теперь берем пять проводков, и соединяем их вот так.
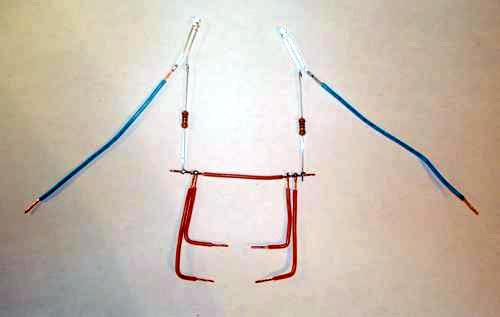
К этой конструкции подсоединяем резистор, фототранзистор и еще один провод. Очень важно: резистор припаиваем к короткой ножке фототранзистора, а синий провод - к длинной.
Шаг 6
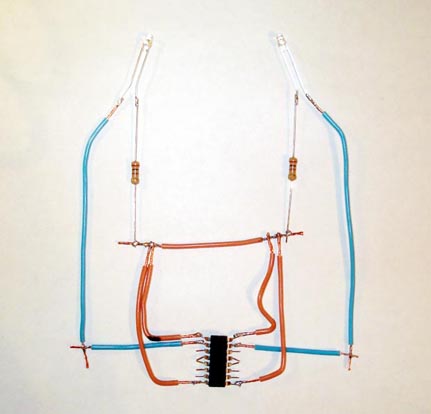
Сейчас будем все подсоединять к драйверу двигателей.
Для начала - четыре провода к ENABLE1 и Vss, Vs и ENABLE2.
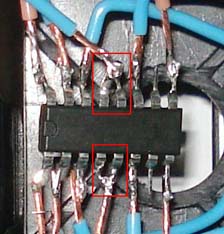
Подсоединим фототранзисторы к INPUT1 и INPUT4.
Шаг 7
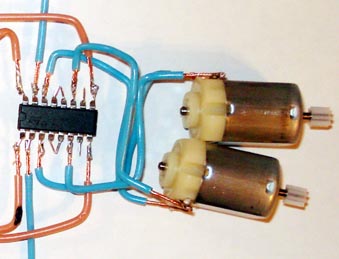
Ну а сейчас соединим получившуюся конструкцию с двумя двигателями.
На рисунке: верхний мотор припаиваем к OUTPUT1 и OUTPUT2, а нижний к OUTPUT4 и OUTPUT3.
Шаг 8
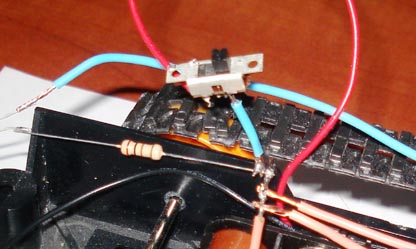
Вот практически и все: осталось только все это соединить с источником питания. Я использовал три батарейки типа АА на 1.5 В.
Сначала подсоединим минус (черный провод, к которому подсоединены два синих - GND и GND, GND и GND)
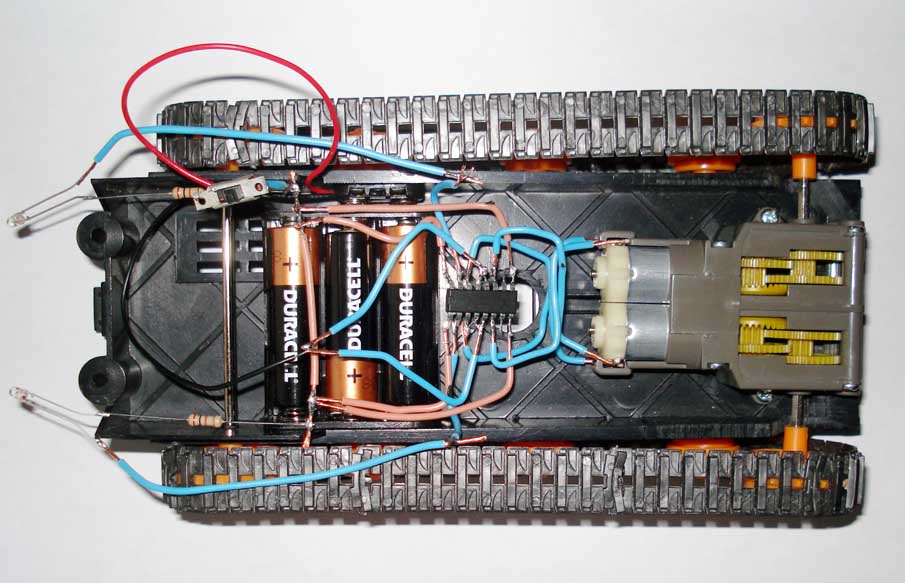
Ну а красный провод (плюс) - от держателя батареек к концу левого резистора.
Как видно на рисунке, я припаял красный провод не напрямую к резистору, а через выключатель.
Заключение
Вот мы с вами и сделали несложного BEAM-робота, который реагирует на световые лучи.
Конечно, можно сделать так, чтобы наш робот следовал за рукой или по линии, но это уже отдельная история, к которой мы еще вернемся.
Автор: Алексей Будников





Фигасе! Резисторы дороже фототранзисторов?
Можно использовать от старого видика или шариковой мышки.
у нас вообще резисторы по 25 копеек