
Раздел: Радиолюбительская технология
Интеллектуальные энкодеры с выходными коммутирующими сигналами
В этой статье рассматриваются современные энкодеры с выходными коммутирующими сигналами, которые востребованы практически во всех приложениях по управлению приводом. Необходимость в использовании этих устройств растет за счет более широкого распространения бесщеточных двигателей постоянного тока (BLDC), обеспечивающих преимущества в управлении, точности и эффективности.

Рис. 1. Энкодеры с выходными коммутирующими сигналами определяют скорость вращения, направление и ускорение вала двигателя
Задача энкодера заключается в определении положения вала электродвигателя для контроллера системы (см. рис. 1). С помощью этих данных контроллер переключает обмотки двигателя, а также определяет его скорость вращения, направление и ускорение, которые используются для поддержания заданных параметров двигателя.
Принцип работы энкодеров основан на разных методах, которые позволяют получить на выходе системы цифровые квадратурные сигналы А и В, а также выходной индексный сигнал для определения направления вращения (см. рис. 2а). С выхода энкодера также поступают сигналы U, V и W для коммутации фаз (см. рис. 2б).
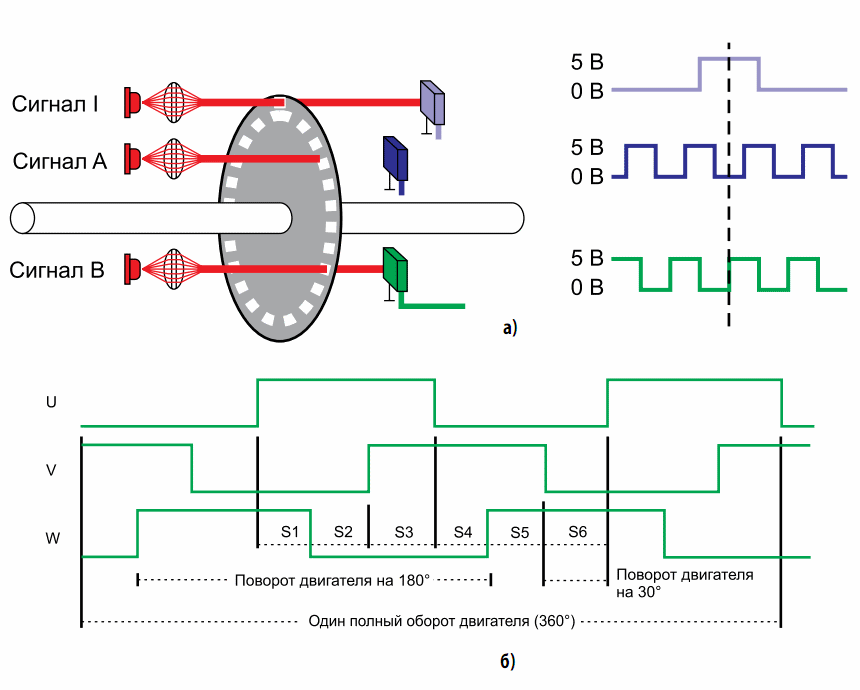
Рис. 2. а) стандартные квадратурные сигналы А и В, а также индексный сигнал на выходе оптического энкодера; 6) сигналы U, V и W на выходе энкодера
Хотя в некоторых системах энкодеры не используются, в действительности эти устройства являются необходимым звеном в подавляющем большинстве контуров управления и обратной связи.
Несмотря на то, что исключение энкодера из системы, несомненно, является достаточно привлекательной возможностью, у векторного управления имеется несколько недостатков: оно не обеспечивает той же точности, что датчиковый метод; при управлении пропускаются отдельные позиции, и требуется сброс; управление осложняется при некоторых значениях крутящих моментов; системному процессору необходимы значительные вычислительные ресурсы. В результате векторное управление используется в приложениях, которые не требуют высокой точности, непрерывного отслеживания положения вала и значений скорости. К таким приложениям относятся, например, бытовая техника и приборы - стиральные и сушильные машины. В то же время для большинства промышленных систем стоимость энкодеров не столь критична по сравнению с жесткими требованиями к рабочим характеристикам.
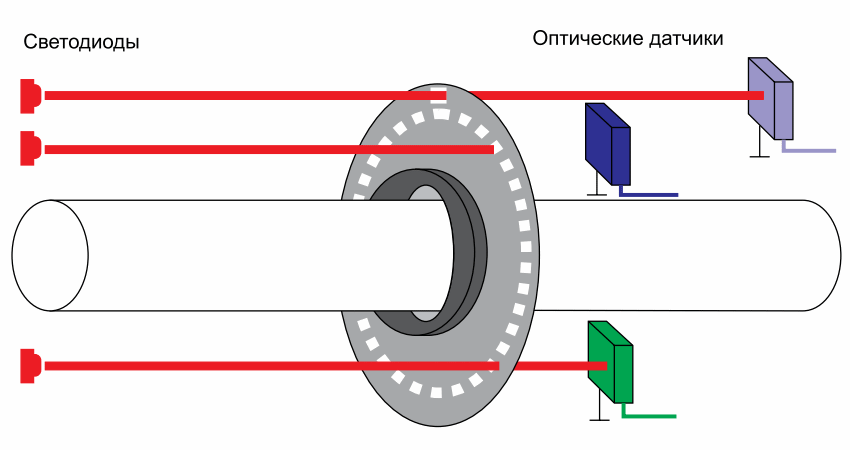
Рис. 3. Оптический энкодер работает, считывая информацию о поворотах вала с помощью света, который проходит сквозь окошки в диске
К настоящему времени широкое применение получили оптические, магнитные и емкостные энкодеры. В оптическом методе используется диск с прорезями, где напротив друг друга установлены светодио-ды и фототранзисторы (см. рис. 3). При вращении этого диска световой поток периодически прерывается, а по поступающим импульсам определяется скорость и направление вращения вала. Несмотря на низкую стоимость и эффективность оптического энкодера, его надежность зависит от воздействия пыли, грязи или масла, попавших в световой тракт. К тому же, как известно, светодиоды со временем выгорают - их яркость, как правило, уменьшается в два раза за несколько лет эксплуатации.
По своей конструкции магнитный энкодер похож на оптический датчик, но в нем задействовано магнитное поле, а не световой луч. Вместо оптического колеса с прорезями в магнитном энкодере применяется намагниченный диск, который вращается над массивом магниторезистивных датчиков. Любое вращение колеса вызывает отклик датчиков, который поступает в схему входного каскада по преобразованию сигнала, позволяя установить положение вала двигателя. К числу достоинств магнитного энкодера относится весьма продолжительный срок службы, а к недостаткам - невысокая точность и восприимчивость к магнитным помехам от электродвигателей.
Помимо оптических и магнитных энкодеров для кодирования положения вала используются датчики Холла. У этих эффективных и надежных устройств, однако, относительно невысокое разрешение.
Учитывая большую необходимость в точном и надежном методе кодирования положения вращающегося вала, компания CUI остановила свой выбор на принципе емкостного измерения, реализованного в стандартном энко-дере, который преобразует угловое положение вала в линейное. Этот же метод используется также в цифровом штангенциркуле (см. врезку). Платформа, построенная на энкодере серии АМТ с выходными коммутирующими сигналами от CUI, обеспечивает высокую эксплуатационную надежность и точность. Емкостной энкодер обладает всеми указанными преимуществами оптического и магнитного датчиков, но не имеет их недостатков. Энкодер состоит из двух групп полос или линий, одна из которых установлена на неподвижном элементе конструкции, а другая - на подвижном элементе. Оба этих элемента образуют переменную емкость, сконфигурированную в виде пары передатчик/приемник (см. рис. 4).
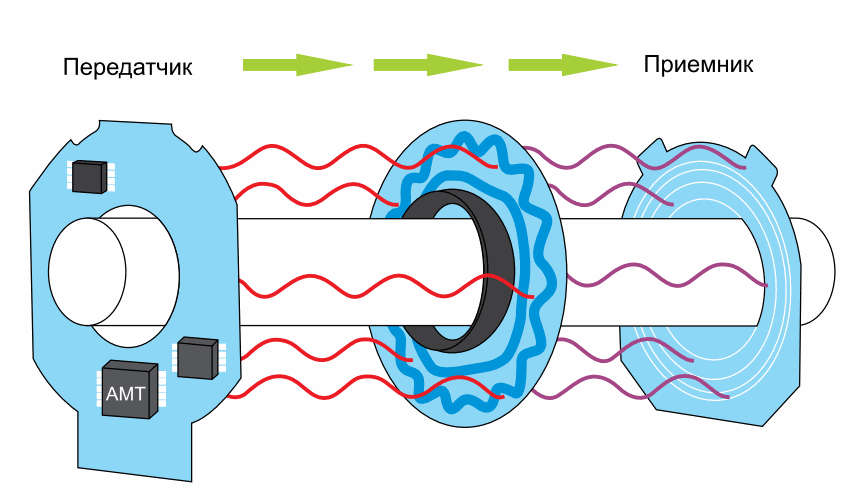
Рис. 4. Емкостной энкодер считает смодулированные импульсы при прохождении сигнала от ротора на вале двигателя
Привлекательность емкостной технологии заключается в том, что при ее использовании элементы системы не подвергаются износу, а энкодер защищен от воздействия пыли, грязи и масла на производстве, что обеспечивает более высокую надежность его эксплуатации, чем оптических устройств. Кроме того, емкостные энкодеры обладают преимуществами цифровых функций управления. К ним относится и способность регулировать разрешение устройства (число импульсов, приходящееся на количество оборотов), что исключает необходимость в его замене энкодером с другим разрешением (большим или меньшим).
Преимущества емкостного энкодера не ограничиваются только отличными характеристиками, универсальностью и надежностью. В отличие от оптического и магнитного энкоде-ров, цифровые функции емкостного энкодера обеспечивают систему многими уникальными преимуществами на всех этапах использования, начиная с разработки изделия и заканчивая его монтажом и даже техническим обслуживанием.
Выходной сигнал оптического или магнитного энкодера вполне функционален, но не обеспечивает универсальности, более полной информации или эксплуатационных преимуществ. Напротив, емкостной энкодер оснащен цифровыми функциями, использует собственную ASIC и микроконтроллер, которые обеспечивают дополнительные возможности и усовершенствованные характеристики. Интеллектуальный энкодер во многом меняет сценарий эксплуатации, сохраняя абсолютную совместимость со стандартными энкодерами.
- Цифровые функции емкостного энкодера позволяют легко и быстро осуществить сброс. Для этого доста-точно только блокировать вал в требуемом положении с помощью соответствующих фаз электродвигателя и дать команду на обнуление. На все эти операции не потребуется больше одной-двух минут и специальных инструментов.
Напротив, процесс сброса оптического или механического энкодера является многоступенчатым, сложным и часто неэффективным. Поначалу требуется заблокировать ротор, изменить положение энкодера, а затем приступить к управлению приводом по сигналам обратной связи с помощью осциллографа, чтобы с использованием противо-ЭДС и энкодера добиться сброса. Поскольку во многих случаях в этом итеративном процессе требуется точная подгонка и проверка, на его выполнение уходит 15-20 минут.
- Цифровые функции энкодера серии АМТ позволяют значительно ускорить проектирование благодаря универсальности, диагностике и оценке характеристик двигателя и контроллера. В частности, поскольку один емкостной энкодер работает в широком диапазоне разрешения и с большим числом полюсных пар, для динамического регулирования характеристики петли ПИД-управления при проектировании контроллера и создании алгоритма можно воспользоваться функцией программируемого разрешения, исключив необходимость в приобретении другого энкодера.
Энкодер серии АМТ осуществляет автономную диагностику, которая ускоряет анализ отказов. Кроме того, имеется возможность проверить корректность работы энкодера или установить причину отказа из-за механической несоосности вала. Более того, разработчик может воспользоваться этой функцией,чтобы принять предупредительные меры -например, провести тестовое испытание энкодера, прежде чем запустить приложение.
- Использование цифрового интерфейса сокращает список материалов (ВОМ). Поскольку параметры системы (скорость вращения, количество полюсных пар и направление переключения), в которой используется емкостной энкодер, задаются с помощью программного обеспечения,отпадает необходимость в других моделях энкодеров для многомоторных или нескольких разных двигателей.
Преимущества емкостного энко-дера очевидны уже на этапах производства и монтажа. Его монтажные отверстия совпадают с отверстиями энкодеров других типов (см. рис. 5). Таким образом, один энкодер можно устанавливать на валы разных диаметров с помощью переходников, что позволяет уменьшить число ассортиментных позиций на производственном складе и сократить ремонтный фонд.
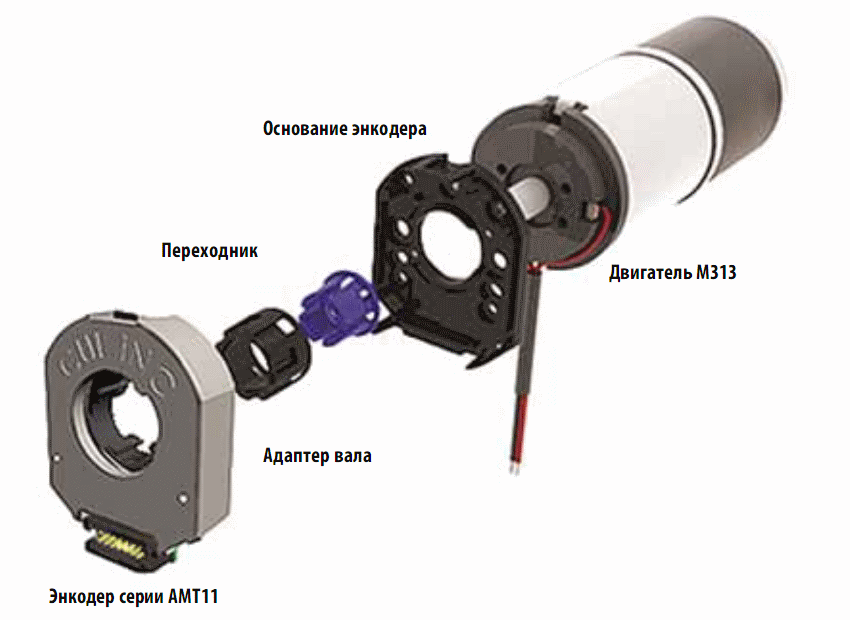
Рис. 5. Монтажные отверстия энкодеров АМТ совместимы с неемкостными энкодерами
Универсальный энкодер АМТ11, состоящий из емкостного преобразователя и электрического интерфейса на основе заказной ASIC, представляет собой небольшой модуль диаметром 37 мм и толщиной 10,34 мм, который работает от источника питания +5 В. Выходные сигналы энкодера могут быть двух типов: несимметричный квадратурный сигнал КМОП-уровней с разницей фаз 90° и дифференциальный сигнал с выхода драйвера линии. Оба этих сигнала электрически совместимы с сигналами стандартных оптических и магнитных энкодеров. Подключение с осевой и радиальной ориентацией осуществляется в зависимости от требований приложения. Диапазон рабочей температуры энкодера составляет -40...105°С
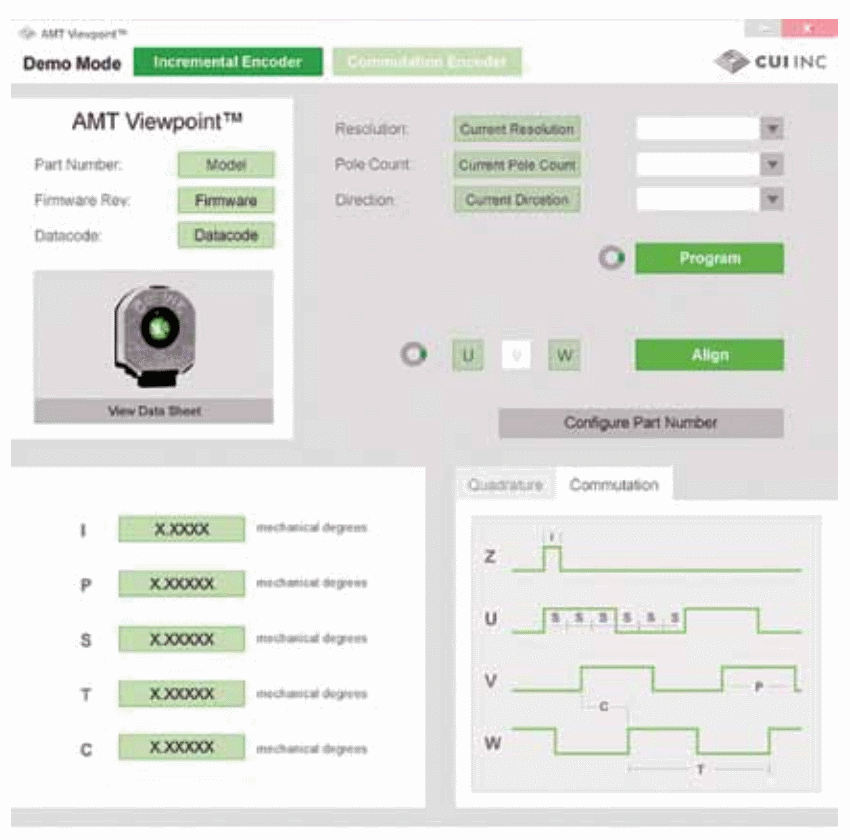
Рис. 6. Программа Viewpoint для энкодеров серии АМТ обеспечивает простой в использовании интерфейс
На рисунке 6 показан графический пользовательский интерфейс, с помощью которого энкодер настраивается под нужды приложения.
Окно пользовательского интерфейса с параметрами позволяет задать основные характеристики энкодера и временной режим. Программирование устройства с помощью этого интерфейса осуществляется в несколько щелчков мыши, а на выравнивание и установку нуля для сигналов А, В, индексной метки или режима переключения требуется всего несколько секунд, что существенно меньше по сравнению со временем выполнения этой же задачи с помощью непрограммируемого энкодера.
В демонстрационном режиме у пользователей имеется возможность познакомиться с графическим интерфейсом и выполнить несколько операций, связанных с энкодером. Наконец, этот интерфейс также поддерживает создание номеров компонентов для заказа специфических моделей энко-деров, в т.ч. с учетом формата выходного сигнала, типа адаптера, монтажной опоры и т.д.
Применение емкостного метода измерения не ограничивается только переключателями. Например, повсеместное распространение получили цифровые штангенциркули. Ингвар Андермо (Ingvar Andermo), инженер-электротехник из стокгольмского института IM Research, 30 лет тому назад работал над созданием емкостной технологии считывания банкнот. СИ. Йоханссон (СЕ. Johansson) пытался создать цифровой штангенциркуль на базе магниторе-зистивной технологии, но емкостной метод оказался гораздо проще.
Первая реализация технологии Johansson Caliper, или Jocal, была представлена на чикагской выставке в 1980 г. Несколько лет спустя японская компания Mitutoyo на основе лицензии на эту технологию выпустила первый цифровой штангенциркуль. С тех пор во всем мире были проданы миллионы этих устройств.
Новый подход - новые возможности.
Пользователи энкодеров никогда особенно не жаждали перемен - и не без веских причин. Промышленное предприятие с системами управления приводом - не место для тех инновационных решений, которые, с одной стороны, призваны обеспечить высокую надежность и качество, а с другой, не подкреплены достаточно продолжительным опытом применения, чего не скажешь, например, о емкостных энкодерах. Их работа основана на принципах, хорошо проверенных за долгие годы эксплуатации. Использование емкостных датчиков в цифровых системах вместо оптических или магнитных энкодеров имеет ряд преимуществ, в т. ч. обеспечивает реализацию интеллектуальных функций при разработке энкодеров с выходными коммутирующими сигналами.Рис. 1. Энкодеры с выходными коммутирующими сигналами определяют скорость вращения, направление и ускорение вала двигателя
Задача энкодера заключается в определении положения вала электродвигателя для контроллера системы (см. рис. 1). С помощью этих данных контроллер переключает обмотки двигателя, а также определяет его скорость вращения, направление и ускорение, которые используются для поддержания заданных параметров двигателя.
Принцип работы энкодеров основан на разных методах, которые позволяют получить на выходе системы цифровые квадратурные сигналы А и В, а также выходной индексный сигнал для определения направления вращения (см. рис. 2а). С выхода энкодера также поступают сигналы U, V и W для коммутации фаз (см. рис. 2б).
Рис. 2. а) стандартные квадратурные сигналы А и В, а также индексный сигнал на выходе оптического энкодера; 6) сигналы U, V и W на выходе энкодера
Энкодерные технологии
Стандартные энкодеры, как правило, выдают 48-2048 импульсов на оборот (имп/об), тогда как в большинстве приложений востребованы значения 800-1024 имп/об. Следует понимать, что использование энкодеров с более высокой точностью удорожает и усложняет стоимость решения, а также накладывает дополнительное бремя вычислений на системный контроллер или цифровой процессор. Избыточная точность приводит к повышению шума в системе, вибрациям и джиттеру.Хотя в некоторых системах энкодеры не используются, в действительности эти устройства являются необходимым звеном в подавляющем большинстве контуров управления и обратной связи.
Бездатчиковые приложения
Наряду с использованием бесщеточных двигателей постоянного тока применяются бездатчиковые схемы, не требующие энкодеров для определения положения вала. Электродвигатели в этом случае управляются с помощью разных алгоритмов, в т. ч. векторным методом (field-oriented control, FOC).Несмотря на то, что исключение энкодера из системы, несомненно, является достаточно привлекательной возможностью, у векторного управления имеется несколько недостатков: оно не обеспечивает той же точности, что датчиковый метод; при управлении пропускаются отдельные позиции, и требуется сброс; управление осложняется при некоторых значениях крутящих моментов; системному процессору необходимы значительные вычислительные ресурсы. В результате векторное управление используется в приложениях, которые не требуют высокой точности, непрерывного отслеживания положения вала и значений скорости. К таким приложениям относятся, например, бытовая техника и приборы - стиральные и сушильные машины. В то же время для большинства промышленных систем стоимость энкодеров не столь критична по сравнению с жесткими требованиями к рабочим характеристикам.
Рис. 3. Оптический энкодер работает, считывая информацию о поворотах вала с помощью света, который проходит сквозь окошки в диске
К настоящему времени широкое применение получили оптические, магнитные и емкостные энкодеры. В оптическом методе используется диск с прорезями, где напротив друг друга установлены светодио-ды и фототранзисторы (см. рис. 3). При вращении этого диска световой поток периодически прерывается, а по поступающим импульсам определяется скорость и направление вращения вала. Несмотря на низкую стоимость и эффективность оптического энкодера, его надежность зависит от воздействия пыли, грязи или масла, попавших в световой тракт. К тому же, как известно, светодиоды со временем выгорают - их яркость, как правило, уменьшается в два раза за несколько лет эксплуатации.
По своей конструкции магнитный энкодер похож на оптический датчик, но в нем задействовано магнитное поле, а не световой луч. Вместо оптического колеса с прорезями в магнитном энкодере применяется намагниченный диск, который вращается над массивом магниторезистивных датчиков. Любое вращение колеса вызывает отклик датчиков, который поступает в схему входного каскада по преобразованию сигнала, позволяя установить положение вала двигателя. К числу достоинств магнитного энкодера относится весьма продолжительный срок службы, а к недостаткам - невысокая точность и восприимчивость к магнитным помехам от электродвигателей.
Помимо оптических и магнитных энкодеров для кодирования положения вала используются датчики Холла. У этих эффективных и надежных устройств, однако, относительно невысокое разрешение.
Учитывая большую необходимость в точном и надежном методе кодирования положения вращающегося вала, компания CUI остановила свой выбор на принципе емкостного измерения, реализованного в стандартном энко-дере, который преобразует угловое положение вала в линейное. Этот же метод используется также в цифровом штангенциркуле (см. врезку). Платформа, построенная на энкодере серии АМТ с выходными коммутирующими сигналами от CUI, обеспечивает высокую эксплуатационную надежность и точность. Емкостной энкодер обладает всеми указанными преимуществами оптического и магнитного датчиков, но не имеет их недостатков. Энкодер состоит из двух групп полос или линий, одна из которых установлена на неподвижном элементе конструкции, а другая - на подвижном элементе. Оба этих элемента образуют переменную емкость, сконфигурированную в виде пары передатчик/приемник (см. рис. 4).
Рис. 4. Емкостной энкодер считает смодулированные импульсы при прохождении сигнала от ротора на вале двигателя
Привлекательность емкостной технологии заключается в том, что при ее использовании элементы системы не подвергаются износу, а энкодер защищен от воздействия пыли, грязи и масла на производстве, что обеспечивает более высокую надежность его эксплуатации, чем оптических устройств. Кроме того, емкостные энкодеры обладают преимуществами цифровых функций управления. К ним относится и способность регулировать разрешение устройства (число импульсов, приходящееся на количество оборотов), что исключает необходимость в его замене энкодером с другим разрешением (большим или меньшим).
Лучший среди других энкодеров
Новые устройства серии АМТ31 от компании CUI являются образцами современного емкостного энкоде-ра, обеспечивающего квадратурные сигналы А и В, индексный сигнал, а также сигналы U, V и W для коммутации обмоток. Этот энкодер, имеющий 20 значений разрешения в диапазоне 48-4096 имп/об, поддерживает семь значений полюсных пар двигателя в диапазоне 2-20. Кроме того, у энкоде-ра серии АМТ31 также имеется стопорный болт, что облегчает его монтаж. Напряжение питания энкодера: 5 В, ток источника питания: 16 мА.Преимущества емкостного энкодера не ограничиваются только отличными характеристиками, универсальностью и надежностью. В отличие от оптического и магнитного энкоде-ров, цифровые функции емкостного энкодера обеспечивают систему многими уникальными преимуществами на всех этапах использования, начиная с разработки изделия и заканчивая его монтажом и даже техническим обслуживанием.
Выходной сигнал оптического или магнитного энкодера вполне функционален, но не обеспечивает универсальности, более полной информации или эксплуатационных преимуществ. Напротив, емкостной энкодер оснащен цифровыми функциями, использует собственную ASIC и микроконтроллер, которые обеспечивают дополнительные возможности и усовершенствованные характеристики. Интеллектуальный энкодер во многом меняет сценарий эксплуатации, сохраняя абсолютную совместимость со стандартными энкодерами.
Новый функционал
Обсудим подробнее то расширение функциональных возможностей, которое обеспечиваются ASIC и микроконтроллером, входящими в состав энкодера серии АМТ31 от CUI.- Цифровые функции емкостного энкодера позволяют легко и быстро осуществить сброс. Для этого доста-точно только блокировать вал в требуемом положении с помощью соответствующих фаз электродвигателя и дать команду на обнуление. На все эти операции не потребуется больше одной-двух минут и специальных инструментов.
Напротив, процесс сброса оптического или механического энкодера является многоступенчатым, сложным и часто неэффективным. Поначалу требуется заблокировать ротор, изменить положение энкодера, а затем приступить к управлению приводом по сигналам обратной связи с помощью осциллографа, чтобы с использованием противо-ЭДС и энкодера добиться сброса. Поскольку во многих случаях в этом итеративном процессе требуется точная подгонка и проверка, на его выполнение уходит 15-20 минут.
- Цифровые функции энкодера серии АМТ позволяют значительно ускорить проектирование благодаря универсальности, диагностике и оценке характеристик двигателя и контроллера. В частности, поскольку один емкостной энкодер работает в широком диапазоне разрешения и с большим числом полюсных пар, для динамического регулирования характеристики петли ПИД-управления при проектировании контроллера и создании алгоритма можно воспользоваться функцией программируемого разрешения, исключив необходимость в приобретении другого энкодера.
Энкодер серии АМТ осуществляет автономную диагностику, которая ускоряет анализ отказов. Кроме того, имеется возможность проверить корректность работы энкодера или установить причину отказа из-за механической несоосности вала. Более того, разработчик может воспользоваться этой функцией,чтобы принять предупредительные меры -например, провести тестовое испытание энкодера, прежде чем запустить приложение.
- Использование цифрового интерфейса сокращает список материалов (ВОМ). Поскольку параметры системы (скорость вращения, количество полюсных пар и направление переключения), в которой используется емкостной энкодер, задаются с помощью программного обеспечения,отпадает необходимость в других моделях энкодеров для многомоторных или нескольких разных двигателей.
Преимущества емкостного энко-дера очевидны уже на этапах производства и монтажа. Его монтажные отверстия совпадают с отверстиями энкодеров других типов (см. рис. 5). Таким образом, один энкодер можно устанавливать на валы разных диаметров с помощью переходников, что позволяет уменьшить число ассортиментных позиций на производственном складе и сократить ремонтный фонд.
Рис. 5. Монтажные отверстия энкодеров АМТ совместимы с неемкостными энкодерами
Универсальный энкодер АМТ11, состоящий из емкостного преобразователя и электрического интерфейса на основе заказной ASIC, представляет собой небольшой модуль диаметром 37 мм и толщиной 10,34 мм, который работает от источника питания +5 В. Выходные сигналы энкодера могут быть двух типов: несимметричный квадратурный сигнал КМОП-уровней с разницей фаз 90° и дифференциальный сигнал с выхода драйвера линии. Оба этих сигнала электрически совместимы с сигналами стандартных оптических и магнитных энкодеров. Подключение с осевой и радиальной ориентацией осуществляется в зависимости от требований приложения. Диапазон рабочей температуры энкодера составляет -40...105°С
Интеллектуальный энкодер и пользовательский интерфейс
Программное обеспечение Viewpoint для энкодеров серии АМТ, работающее на ПК под управлением ОС Windows, позволяет ускорить проектирование и сократить время на выполнение рутинных задач, к которым, например, относится определение номера модели и ее версии. Для подключения энкодера к ПК требуется лишь USB-кабель.Рис. 6. Программа Viewpoint для энкодеров серии АМТ обеспечивает простой в использовании интерфейс
На рисунке 6 показан графический пользовательский интерфейс, с помощью которого энкодер настраивается под нужды приложения.
Окно пользовательского интерфейса с параметрами позволяет задать основные характеристики энкодера и временной режим. Программирование устройства с помощью этого интерфейса осуществляется в несколько щелчков мыши, а на выравнивание и установку нуля для сигналов А, В, индексной метки или режима переключения требуется всего несколько секунд, что существенно меньше по сравнению со временем выполнения этой же задачи с помощью непрограммируемого энкодера.
В демонстрационном режиме у пользователей имеется возможность познакомиться с графическим интерфейсом и выполнить несколько операций, связанных с энкодером. Наконец, этот интерфейс также поддерживает создание номеров компонентов для заказа специфических моделей энко-деров, в т.ч. с учетом формата выходного сигнала, типа адаптера, монтажной опоры и т.д.
ИГОРЬ СМОЛЯНИНОВ, разработчик (Электронные компоненты №1 2016)
От штангенциркуля - к энкодеру
В сенсорных переключателях применяется принцип емкостного измерения; при этом палец пользователя выступает в качестве второй обкладки конденсатора. Данные об изменении его емкости считываются по интерфейсной схеме. Таким образом, воспроизводится функция традиционной электромеханической кнопки. Сенсорные переключатели защищены от воздействия пыли, воды и неправильной эксплуатации благодаря отсутствию подвижных элементов и небольшим металлическим пластинам, которые плотно прилегают к монтажной поверхности.Применение емкостного метода измерения не ограничивается только переключателями. Например, повсеместное распространение получили цифровые штангенциркули. Ингвар Андермо (Ingvar Andermo), инженер-электротехник из стокгольмского института IM Research, 30 лет тому назад работал над созданием емкостной технологии считывания банкнот. СИ. Йоханссон (СЕ. Johansson) пытался создать цифровой штангенциркуль на базе магниторе-зистивной технологии, но емкостной метод оказался гораздо проще.
Первая реализация технологии Johansson Caliper, или Jocal, была представлена на чикагской выставке в 1980 г. Несколько лет спустя японская компания Mitutoyo на основе лицензии на эту технологию выпустила первый цифровой штангенциркуль. С тех пор во всем мире были проданы миллионы этих устройств.
Комментарии принадлежат их авторам. Мы не несем ответственности за их содержание.






![Универсальный блок питания на LM 723 [1-30V/0-3A]](https://radio-hobby.org/uploads/news/image/3edd52ab-854c-3ee6.jpg)
